



Next: Use and misuse of
Up: Building the covariance matrix
Previous: Normalization uncertainty
Contents
Let us assume there are  independently
measured values
independently
measured values  and
and
 calibration constants
calibration constants  with their covariance matrix
with their covariance matrix
 . The latter
can also be theoretical parameters influencing the data, and
moreover they may be
correlated, as usually
happens if, for example, they are parameters of a calibration fit.
We can then include the in the vector that contains the
measurements and in the covariance matrix
. The latter
can also be theoretical parameters influencing the data, and
moreover they may be
correlated, as usually
happens if, for example, they are parameters of a calibration fit.
We can then include the in the vector that contains the
measurements and in the covariance matrix 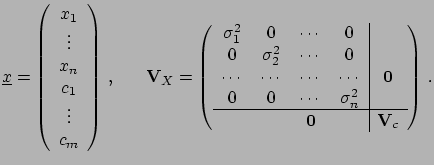 :
:
 |
(6.44) |
The corrected quantities are obtained from the most general
function
 |
(6.45) |
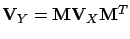
and the covariance matrix
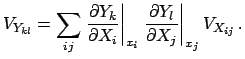 from the covariance propagation
from the covariance propagation
 .
.
As a frequently encountered example, we can think of several
normalization constants, each affecting a subsample of the data -
as is
the case where each of several detectors
measures a set of physical quantities.
Let us consider just three quantities
( ) and three
uncorrelated
normalization standard uncertainties (
) and three
uncorrelated
normalization standard uncertainties (
 ),
the first common to
),
the first common to
 and
and  , the second to
and
, the second to
and 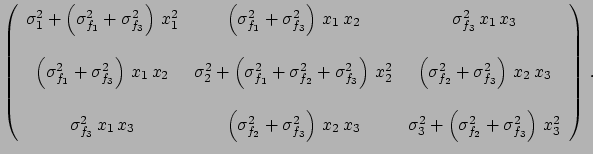 and the third to all three.
We get the following covariance matrix:
and the third to all three.
We get the following covariance matrix:
 |
(6.46) |
Next: Use and misuse of
Up: Building the covariance matrix
Previous: Normalization uncertainty
Contents
Giulio D'Agostini
2003-05-15