We need now to specify
 . As usual,
in lack of better knowledge, we take a Gaussian distribution
of unknown parameter
. As usual,
in lack of better knowledge, we take a Gaussian distribution
of unknown parameter  ,
with awareness that this is just a convenient, approximated
way to quantify our uncertainty.
,
with awareness that this is just a convenient, approximated
way to quantify our uncertainty.
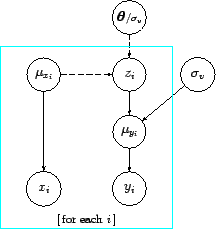
At this point a summary of all ingredients
of the model in the specific case of linear model is in order:
 |
 |
 |
(39) |
 |
|
 |
(40) |
 |
 |
![$\displaystyle m\, \mu_{x_i} + c
\hspace{10.0mm} [\,\Rightarrow\ \delta(z_i- m\, \mu_{x_i} + c)\,]$](img146.png) |
(41) |
 |
|
 |
(42) |
 |
|
![$\displaystyle {\cal U}(-\infty,+\infty)
\hspace{5.0mm} [\,\Rightarrow\ k_{x_i}\,]$](img150.png) |
(43) |
 |
 |
![$\displaystyle \mbox{see later} \hspace{12.4mm} [\,\Rightarrow \mbox{'uniform'}\,],$](img153.png) |
(44) |
where
 stands for a uniform distribution
over a very large interval, and the symbol `
stands for a uniform distribution
over a very large interval, and the symbol ` '
has been used to deterministically assign a value, as done in
BUGS[11] (see later).
'
has been used to deterministically assign a value, as done in
BUGS[11] (see later).
![$\displaystyle \prod_i
\frac{1}{\sqrt{\sigma^2_v + \sigma_{y_i}^2+m^2\,\sigma_{x...
...+ \sigma_{y_i}^2+m^2\,\sigma_{x_i}^2) }
\right]}\, f(m,c,\sigma_v\,\vert\,I)\,.$](img130.png)
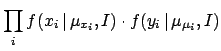

![$\displaystyle \int\! f(x_i\,\vert\,\mu_{x_i},I) \cdot f(y_i\,\vert\,\mu_{y_i},I...
... z(\mu_{x_i},{\mbox{\boldmath$\theta$}})\,] \,\,
d{\mu_{x_i}}d{\mu_{y_i}}d{z_i}$](img166.png)

![$\displaystyle \int \frac{1}{\sqrt{2\pi}\, \sigma_{x_i}}\,
\exp{ \left[ -\frac{(...
...a_{y_i}}\,
\exp{ \left[ -\frac{(y_i-\mu_{y_i})^2}
{2\,\sigma_{y_i}^2}
\right] }$](img168.png)
![$\displaystyle \hspace{3.0mm}\cdot \frac{1}{\sqrt{2\pi}\, \sigma_{v}}\,
\exp{ \l...
..._i}-m\,\mu_{x_i}-c)^2}
{2\,\sigma_{v}^2}
\right]
} \,\, d\mu_{x_i} d\mu_{y_i}\,$](img169.png)
![$\displaystyle \int \frac{1}{\sqrt{2\pi}\, \sigma_{x_i}}\,
\exp{ \left[ -\frac{(x_i-\mu_{x_i})^2}
{2\,\sigma_{x_i}^2}
\right] }$](img170.png)
![$\displaystyle \hspace{3.0mm} \cdot \frac{1}{\sqrt{2\pi}\, \sqrt{\sigma_{v}^2+\s...
...\mu_{x_i}-c)^2}
{2\,(\sigma_{v}^2+\sigma_{y_i}^2)}
\right]
} \,\, d\mu_{x_i} \,$](img171.png)
![$\displaystyle \frac{1}{\sqrt{2\pi}\, \sqrt{\sigma_{v}^2+\sigma_{y_i}^2
+m^2\sig...
..._i}-m\,x_i-c)^2}
{2\,(\sigma_{v}^2+\sigma_{y_i}^2+m^2\sigma_{x_i}^2)}
\right]
}$](img172.png)