Next: pzd100Derivazione di Gauss della
Up: Impostazione del problema. Caso
Previous: Verosimiglianza normale con nota
Indice
Effetto di una prior rilevante: combinazione
di risultati
A questo punto, una domanda naturale è cosa succede
se la prior non è proprio talmente vaga da essere ininfluente
sulla distribuzione di probabilità finale. Per semplificare
i conti, modellizziamo la nostra conoscenza a priori con una
gaussiana centrata in  e di deviazione standard
e di deviazione standard
 . Ad esempio, tale stato di conoscenza potrebbe
derivare da una precedente misura effettuata nelle condizioni
del paragrafo precedente. Come discusso a lungo nel capitolo
5, nello schema bayesiano il riaggiornamento
della probabilità si effettua usando come prior la distribuzione
finale dell'inferenza precedente. Nel nostro caso, abbiamo
. Ad esempio, tale stato di conoscenza potrebbe
derivare da una precedente misura effettuata nelle condizioni
del paragrafo precedente. Come discusso a lungo nel capitolo
5, nello schema bayesiano il riaggiornamento
della probabilità si effettua usando come prior la distribuzione
finale dell'inferenza precedente. Nel nostro caso, abbiamo
L'integrale è un po' più complicato del caso precedente.
Con le opportune semplificazoni11.3 il risultato dell'inferenza è:
 |
(11.7) |
con
I possibili
valori di  sono ancora descritti da una gaussiana
centrata in corrispondenza della
media pesata fra
sono ancora descritti da una gaussiana
centrata in corrispondenza della
media pesata fra  e , con pesi
pari all'inverso delle varianze.
Previsione e
incertezza di previsione valgono
E
e , con pesi
pari all'inverso delle varianze.
Previsione e
incertezza di previsione valgono
E e
e
 .
Il caso di prior vaga è recuperato per
.
Il caso di prior vaga è recuperato per
 (con `ragionevole').
(con `ragionevole').
Poiché il risultato
E è quello che
si ottiene quando la prior è ininfluente, mentre la previsione
precedente
E
è quello che
si ottiene quando la prior è ininfluente, mentre la previsione
precedente
E può essere pensato come dovuto ad una precedente inferenza,
le (11.8) e (eq:waver2) ci mostrano
come combinare due risultati
parziali. In particolare,
interpretando l'inverso
della varianza come peso statistico, la (11.9)
ci dice che il peso statistico risultante dall'inferenza
globale è pari alla somma dei pesi statistici delle inferenze
parziali.
può essere pensato come dovuto ad una precedente inferenza,
le (11.8) e (eq:waver2) ci mostrano
come combinare due risultati
parziali. In particolare,
interpretando l'inverso
della varianza come peso statistico, la (11.9)
ci dice che il peso statistico risultante dall'inferenza
globale è pari alla somma dei pesi statistici delle inferenze
parziali.
A questo punto, la combinazione di molti risultati
parziali indipendenti,
ciascuno ottenuto da una prior vaga è abbastanza
ovvio. È istruttivo ragionare in due modi diversi.
- Possiamo immaginare una catena di inferenze, del tipo
ove abbiamo indicato con
 e
e
 l'insieme dei valori osservati e delle deviazioni standard
legate alla verosimiglianza di ciascuna di esse. Applicando
iterativamente il teorema di Bayes abbiamo:
l'insieme dei valori osservati e delle deviazioni standard
legate alla verosimiglianza di ciascuna di esse. Applicando
iterativamente il teorema di Bayes abbiamo:
 |
(11.10) |
- Il secondo modo consiste nel pensare alla verosimiglianza
congiunta di osservare
per ogni ipotesi di
:
 dati dati |
(11.11) |
Otteniamo lo stesso risultato indipendentemente dal percorso
seguito, il ché è confortante, visto che entrambi i
ragionamenti sono legittimi (vedi anche discussioni
in proposito nel capitolo
5).
In conclusione, abbiamo la seguente regola di combinazione:
che possiamo riscrivere,
facendo riferimento agli  valori osservati
valori osservati  e
alle deviazioni standard delle relative verosimiglianze come
e
alle deviazioni standard delle relative verosimiglianze come
Si noti il carattere più generale delle (11.12)
e (11.13) rispetto a queste ultime, in quanto
quelle possono far riferimento a situazioni più complicate
delle semplici osservazioni individuali. Ad esempio,
ciascuna previsone
E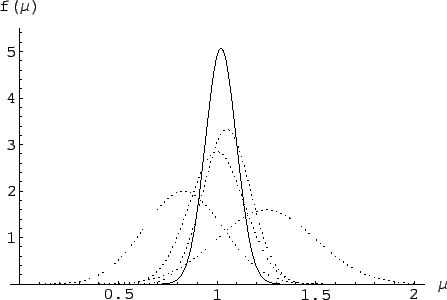 può derivare essa stessa
da una precedente combinazione o da un'analisi complicata.
può derivare essa stessa
da una precedente combinazione o da un'analisi complicata.
Figura:
Esempio di combinazione di quattro inferenze
indipendenti (curve tratteggiate) risultanti in un'unica
inferenza globale (curva tratteggiata).
 |
Un esempio di inferenza combinata è mostrata
in figura 11.3.
Tornando alle osservazioni individuali indipendenti, vediamo il
caso in cui la deviazione standard sia la stessa per tutte
le osservazioni,
ovvero

 .
Le (11.14) e (
.
Le (11.14) e (![[*]](file:/usr/lib/latex2html/icons/crossref.png) ) diventano
) diventano
La previsione di è pari alla media aritmetica
delle osservazioni. Inoltre, si vede come l'insieme delle
osservazioni indipendenti hanno un peso statistico
di volte quello di una singola osservazione.
Next: pzd100Derivazione di Gauss della
Up: Impostazione del problema. Caso
Previous: Verosimiglianza normale con nota
Indice
Giulio D'Agostini
2001-04-02